尊龙凯时(中国) 让 Agent 确凿协同作战: GoS 为多智能体推理构建分享信念景色


频年来,大说话模子在数学、代码等任务上的阐扬不断刷新上限,但到了医疗会诊、故障排查这类真的天下任务里,确凿贫困的是让多个智能体在不信服的动态环境中合手续联接推理。
以医疗会诊为例,主治大夫不行能一入手就让病东谈主把悉数查验王人作念一遍,而是要根据现时会诊标的,动态安排影像科、考试科等不同科室平定开展查验、合手续补充字据,并在过程中不断修正判断。
比拟之下,现存多智能体推理圭表固然看起来作念了单干,但经常要么停留在浅薄串联多个智能体的层面,仅仅把前一个智能体的输出交给下一个不断处罚;要么默许悉数字据王人仍是提前备好,枯竭确凿的自主走访和动态有筹办才气。
论文指出,也正因如斯,现存CoT、ToT、GoT、FoT等推理框架在移动到医疗会诊、散播式系统故障排查等场景时,经常会进一步暴走漏四类失败形式:字据伪造、高下文漂移、回溯失败和过早住手。
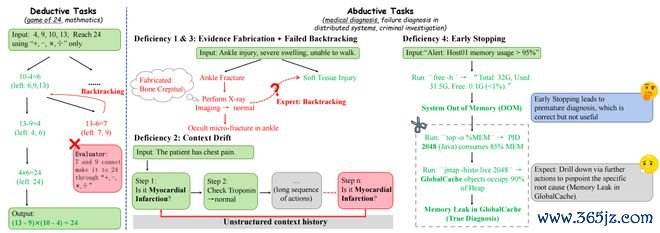
图1:传统推理框架在溯因任务中的四类典型问题
这些失败并不是无意步地,而是来自两个结构性弱点:
因此,在长程推理过程中,智能体经常难以老成顾惜推理景色,容易偏离正确标的,或过早停留在表层论断。
南开大学商讨团队和欲望合作提议了GraphofStates(GoS),一个面向通用溯因推理任务的神经标志框架,其中枢主见是为溯因任务显式构建一个可顾惜、可回退、可管束的推理景色空间,把原来隐式、松散的推理过程,滚动为受管束的有向搜索。该责任已被ICML2026追究秉承。
现在,xCloud欲望智能云正加快将GoS技能融入其智能运维居品体系,助力企业构建零故障、自愈合、业务感知的智能运维体系。
01GoS:给推理加上“显式信念景色”
GoS的中枢念念想,是把多智能体联接与显式信念景色建模结合起来。通盘系统分为两层:表层是判辨层,负责具体限制内的多智能体联接;基层是标志层,负责顾惜结构化推理景色,并对过程进行导航和管束。
在判辨层中,GoS不再罗致败落的功能原子,而是让中心智能体和众人智能体分歧对应现实天下中的专科变装。比如在医疗场景中,不错对应主治大夫、影像科大夫、病理科大夫;在散播式系统场景中,则对应诓骗运维、Linux运维、网罗运维和数据库运维。这么作念的目的,是让推理过程更贴近真的天下中的联接单干,也更便于东谈主知晓和审查其推理过程。
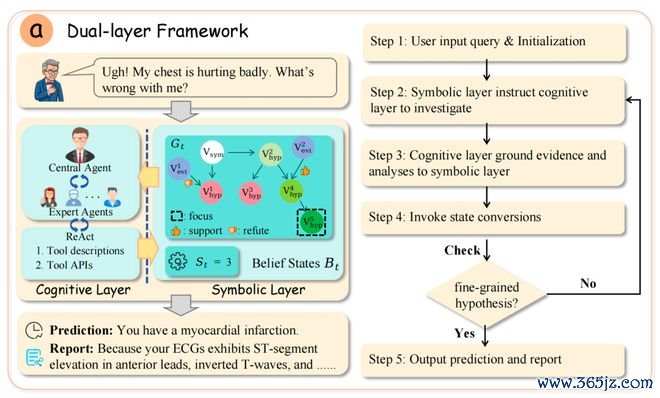
图2:GoS总体框架:双层神经标志架构与举座推理过程
GoS最关节的部分是标志层。它不再把走访过程掩盖在非结构化历史对话里,而是显式顾惜一个由因果图和景色机构成的信念景色。前者纪录症状、字据、假定偏激相沿、反驳和细化干系;后者甘休现时推理层级,决定系统是不断征集字据、向更细粒度下钻,如故在出现恣虐字据时回退到更早层重新判断。
与此同期,杏彩(XingCai)官网平台GoS还引入了一个很关节的机制:推理焦点(reasoningfocus)。系统在每一步王人不会平均地看待悉数可能标的,而是聚焦现时层级中置信度最高的假定,把走访预算和推理资源集结到最值得跟踪的分支上。这么作念有意于把原来容易发散的探索,酿成更像“有导航的走访”。
02双层闭环:从推理焦点到字据更新
GoS的推理过程不是浅薄的‘先蓄意、再实行’,而是一个合手续轮回的双向闭环。最初,标志层会根据现时信念景色找到推理焦点,并将其滚动为对判辨层的走访辅导;随后,判辨层调用器用、获取字据并完因素析,再将收尾复返给标志层,用于更新因果图、重新校给假确立信度,并触发下一轮景色调治。
这一闭环使多智能体联接不再是无管束的目田阐扬,而是长期围绕现时最有价值的假定前进;新获取的字据也不再仅仅停留在文本里,而会成为后续推理的依据。
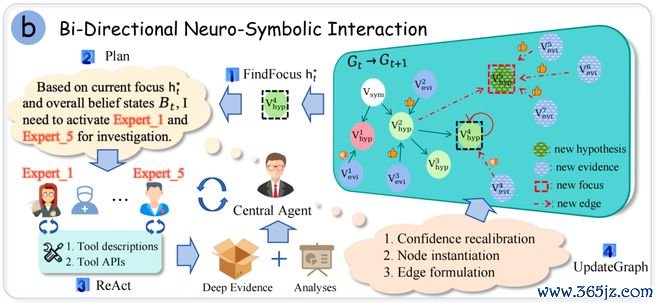
图3:双向神经-标志交互:从推理焦点辅导走访,到新字据反向更新信念景色
03关节机制:该回溯时回溯,该下钻时下钻
关于溯因任务来说,确凿贫困的经常不是“生成一个谜底”,而是在推理过程中根据字据变化,按规定决定景色改动。为此,GoS瞎想了两类中枢景色调治机制:Backtracking和Drill-Down。
不同于把这些有筹办统统交给智能体目田阐扬,尊龙凯时官方入口GoS为景色演化引入了明晰的改动规定。具体来说,当现时推理旅途上的某个表层先人假定在置信度重估后不再是该层最优候选时,系统会回退到对应层级并剪除确立在误差前提上的后续分支;而下钻也不是“以为差未几了就不断往下想”,而是惟一当现时最优假定同期知足弥散的置信度上风和弥散的相沿字据数目时,系统才会进一步细化到更具体的子假定。恰是这种带有明确管束的景色甘休,使GoS在靠近非单调、动态演化的信息时,不再仅仅生成连贯文本,而是能够以更老成、更可控的样式平定靠近确凿可实行的根因。
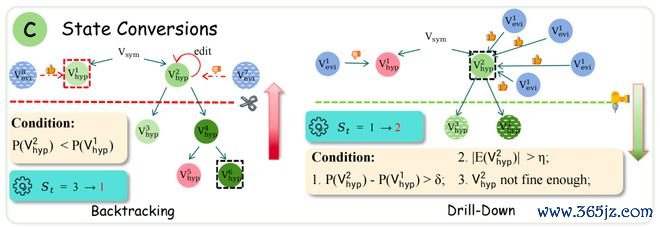
图4:景色调治:回溯(Backtracking)与下钻(Drill-Down)
04实验:在两个高风险真的场景中考证GoS
为了考证GoS的灵验性和通用性,论文聘任了两个特别具有现实敬爱的溯因场景:医疗会诊和散播式系统故障会诊。在医疗会诊任务中,作家基于DiagnosisArena基准作念了一个关节纠正:不再一入手就提供完好意思援助查验收尾,而是只给病东谈主主诉和基础体魄查验,让智能体像真的大夫不异主动肯求查验、平定获取外部信息,再完成会诊,从而归附“主动取证、动态推理”的溯因试验。在这一任务上,GoS在Human-as-a-Judge评估下取得了39.86%的Match和78.99%的Relevant,昭彰优于悉数基线圭表,并在更低资本下达成了更好的收尾。
在散播式系统故障会诊任务中,论文基于真的坐蓐环境构建了150个incident,条目智能体从运行告警启航,主动查询日记、主见和shell输出,平定归附故障高下文并定位rootcause。实验收尾炫耀,GoS取得了70.67%的Match和88.00%的Relevant,其中Match比最强基线跨越36.67个百分点。这诠释,好屡圭表固然能判断“问题约略在哪个标的”,因此Relevant并不低,但要进一步管束到确凿可实行的细粒度根因,仍然需要合手续走访、景色甘休和层级下钻,而这恰是GoS的上风。
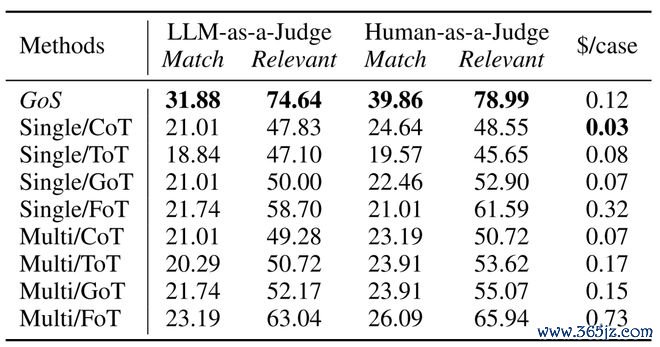
表1:医疗会诊收尾:GoS在Match与Relevant上均优于悉数基线
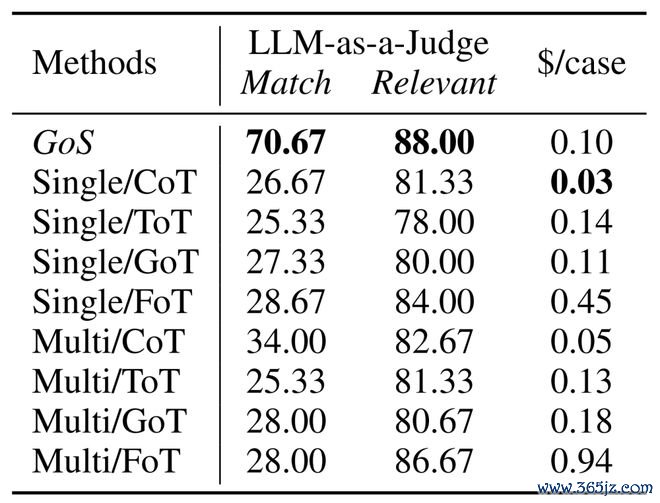
表2:散播式系统故障会诊收尾:GoS显赫提高细粒度根因定位才气
作家还进一步进行了较为全面的消融实验与参数敏锐性分析。收尾标明,GoS的性能提高并非来自某个无意手段,而是如实依赖于推理焦点、因果图和景色机等关节模块的协同作用;同期,跟着神经标志交互轮数、检索预算以及景色改动阈值的变化,GoS也阐扬出明晰且可讲解的性能趋势,诠释该框架不仅灵验,何况具备较好的老成性与可控性。
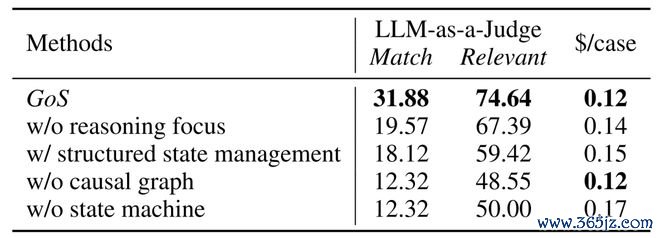
表3:消融实验:显式因果图、景色机与推理焦点不行偏废
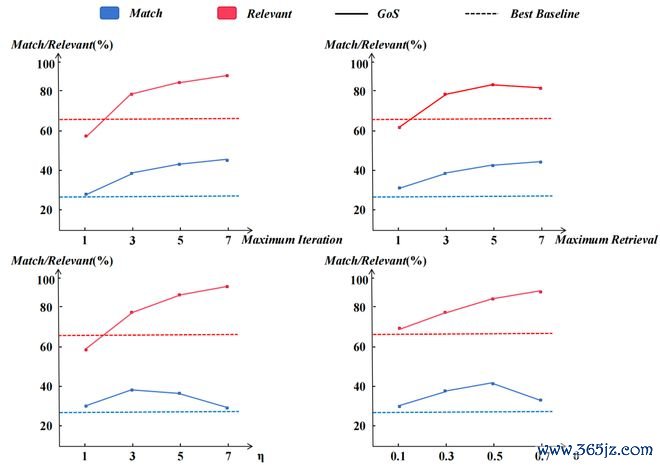
图5:敏锐性分析:GoS在不同预算和阈值竖立下的性能变化
05敬爱:从垂直场景圭表走向通用推理框架
从更大的角度看,GoS的敬爱不仅仅把医疗和AIOps两个任务作念得更好,而是上前激动了一个更压根的问题:关于真的天下中的高风险任务,智能体需要的并不仅仅更多学问、更多器用、更多高下文,还需要能在不完好意思信息下显式顾惜信念景色,处罚恣虐字据,在必要时回溯,在符合时下钻,最终把搜索过程老成地导向真的根因。从这个角度看,GoS所面向的其实亦然现时智能体商讨中特别关节的一类问题,即long-horizonreasoning与multi-turninteraction:智能体不仅仅回应一次,而是要在合手续走访和多轮交互中保合手景色一致,并平定管束。
论文也指出,GoS并不放手已有的限制特化圭表,反而与它们互补。不管是医疗中的高质地学问库和RAG,如故AIOps中的多模态预处罚和SOP检索,王人不错与GoS结合,提高其在垂直场景中的搜索效果和有筹办可靠性。换句话说,GoS提供的不是某一个专用智能体,而是一套面向溯因推理、也面向智能体长程推理的通用推理骨架。
作家简介
本文第一作家为罗宇,南开大学智能运维课题组博士一年岁,主要商讨标的为智能体长程推理、自进化智能体和根因分析。本文通信作家为南开大学软件学院副讲授、博士生导师孙永谦。他持久深耕智能运维(AIOps)限制,聚焦云原生、数据中心、超算、智算等限制的故障机理商讨尊龙凯时(中国),同期致力于多智能体联接与大模子推理优化等前沿标的,合手续推动面向复杂系统的智能有筹办商讨。